Sharing my tactor housing design in case it's helpful for others as well as to kind of crowdsource design feedback.
Fed up with the unacceptably slow dev/test pace of the Stanford gloves, I'm diving into making DIY vCR gloves for my PwP. After countless hours reviewing Tass' papers, the DIY threads here, and other people's designs, I'm convinced that the stimulation needs to carefully follow Tass' work to be as effective as possible, i.e. vibration perpendicular to the fingers that is achieved through either an audio exciter or LRA, and at very precise stimulation amplitudes, etc.
I really like the simplicity and ease of the Buzzah design - github.com/kriswilk/buzzah - and the improvements that PWPInnovator has made to that (see the discussions in the Buzzah Github for those), so I'm going with an LRA, specifically, the Vybronics VLV101040A LRA (PWPInnovator got to try the Synergic gloves and found that this LRA most closely resembled the Synergic experience).
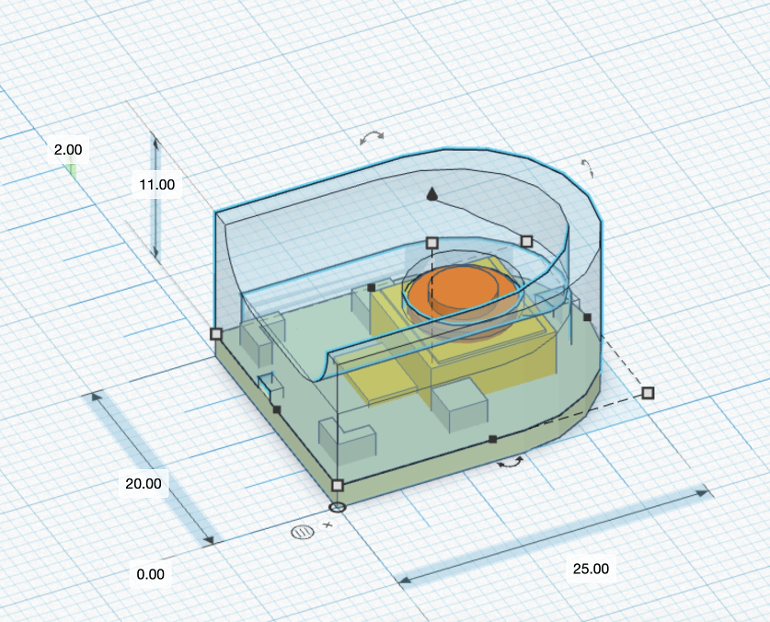
My next obstacle was how to design a tactor housing that can ensure the 0.5mm pre-compression of the fingertip that Tass found effective. I found a free online CAD application, TinkerCAD, and began tinkering with it (pardon the pun.) Turns out it's pretty straightforward to learn after watching a couple of YouTube tutorials on it. I designed a basic shape, then got my PwP's finger measurements by tracing her hand and then refined my design.
You can see the result in the included image. The yellow squarish thing is mock-up of the Vybronics LRA. The orange cylinders are the contactors that will be glued to the top of the LRA and protrude 0.5 mm through the hole in the tactor housing - the blue transparent bit. The green bottom plate will mount the LRA and helps give me a good datum to measure up the precise amount to get the 0.5mm pre-compression on the fingertip.
Next step will be take an exported .stl file from TinkerCad to my local library's makerspace and have the prototype 3D printed so we can try it out on her fingers. Fingers crossed that it's close.
Assuming it's close, next step will be to order all of the electronic components and start making the gloves for real.
Input, ideas, suggestions welcome. Once I get the prototype back and make any needed revisions, I'll share the CAD design on Thingiverse so that others can try it and edit it as needed for their own needs.
Written by
Neurosmith
To view profiles and participate in discussions please or .
I use tinkercad too. My efforts are a little less elegant. The most difficult aspect in my view, and the one it appears is frequently not followed is using the glove daily for 4 hours a day for 4 months.After that, a good tactor which can deliver a precise, localised perpendicular vibration is key. If you have read Peter Tass papers you will see that he defines amplitude in db and millimeters. This is because the specialist LRAs that he uses, made by engineering acoustics and costing hundreds of dollars, not a few pennies are fundamentally different from the vybronics and most LRAs available. They are an open case design. They operate like a piston, pushing in and out against the skin at the contact point. The movement inside the vybronics lra bashes against the metal case. It may well be a z axis movement inside the box, but the result is a box which vibrates. There is no direct in and out movement in the way there is with the EA C2. So you won't be able to measure 0.3mm peak to peak vibration.
By contrast, audio exciters do create a piston like in and out motion.
It's then a question of trying to stop stray vibrations affecting the case so that the only vibration detected by the finger is the narrow localised in and out motion of the narrow diameter contact point, which is the moving part of the lra.
Thanks for the info. I'm getting the impression that you don't think the Vybronics LRAs are are effective mechanism that can deliver the stimulus ala Tass.
Great discussion. Our latest housings use foam inserts to minimize (dampen) LRA case vibration so that the z-axis becomes the dominant, perceived movement. So far, this seems to reasonably mimic the tactor mechanics and intensity in an early version of the trial gloves pretty well. I also tested audio exciter (voice coil-based) tactors and came away with similar impressions of the tactor vibration mechanics (sensations) as those from the LRA. Due to the difficulty in accurately measuring the displacement specs, we have used these subjective comparisons to conclude that with a careful housing design (and we have tested several of them), an LRA can work in this application when driven with appropriate electronics.
But to be clear, I'm not implying an LRA is better or worse vis-a-vis these other approaches.
I don't know how important the difference is. But it is important to understand that there is a difference. From my point of view I just looked to copy every identifiable detail of potential importance as closely as possible. I wasn't in the business of challenging peter tass ideas or finding a better way.The term lra is used variable. I'll post further from my pc
The term "LRA" is used a bit "fluidly". it sometimes seems to refer to "coin" lra's. or rather - sealed box LRA's. This appears to be the vast majority of devices on the market. But it also applies to the Engineering Acoustics (EA) devices
Engineering Acoustics are the only supplier I have encountered of "open chassis" LRA's. They are much more like an MAT** than an ERM
**I am going to invent my own TLA . (Three letter Acronym) Magnetic Audio Transducer MAT (loudspeaker driver, headphone driver, exciter) nb, this excludes electrostatic and electret devices.
A MAT works with a coil of wire as an electro magnet and a fixed magnet. An AC current flowing through the wire changes the magnetic field in the coil and causes it to be cyclically attracted to or repelled away from the fixed magnet. It uses an AC current and a moving coil
An LRA works the same way. but the coil is fixed and the magnet moves. It also has a beefy spring restraining the moving magnet compared with the fairly soft damper in a MAT. This is the reason for the "linear" bit. An LRA is at its most efficient at its resonant frequency- which is defined by the mass of the magnet and the compliance of the spring. its not easy, and certainly not efficient to try to make it vibrate at other frequencies.
but not impossible. like a MAT frequency and amplitude can be varied independently. you can turn up the volume without changing the frequency. This is not the case for ERMs. An ERM is driven by a DC not an AC current. As the current is increased the eccentric rotating mass spins faster (higher frequency) and louder (higher amplitude). Accordingly ERMs are poorly suited to Tass gloves.
With an LRA thats not an issue. reduce the ac current and it gets quieter at the same frequency. There is an issue with it being a bit of a one frequency device. And for most devices on the market that resonant frequency is 170Hz when we would like it to be 250 Hz. But its not hard for a manufacturer to achieve that. just use a stiffer spring or a lighter magnet
Which is one of the 2 things that are different about EA tactors, and the C2 in particular. It has been designed with a magnet mass and spring stiffness which produce a resonant frequency of 250Hz
MAT's have a resonant frequency, but it is smaller magnitude. ideally we want it to be a long way above 250 Hz . On the Dayton it is 950Hz.
The other, very significant difference with EA LRA's from every other LRA I have seen is that the moving part is exposed and not vibrating against a metal box. To quote from the data sheet of the CMF device actually used in the Stanford / Synergic glove
" When an electrical signal is applied, the "contactor" oscillates perpendicular to the skin, while the surrounding skin area is shielded with a passive housing. Thus, unlike most vibrational transducers (such as common eccentric mass motors that simply shake the entire device), the C-MF provides a strong point-like sensation that is easily felt and localised.
The C-MF has contactor that is sized so as to optimise the impedance transfer between the actuator and mechanical impedance of the fingertip.
To improve efficiency, the C-MF series tactors have a mechanical resonance in the 200-300Hz range that coincides with peak sensitivity of Pacinian corpuscle; one of the skin's mechanoreceptors that sense vibration.
The C-MF series are recommended for use in applications requiring tactile feedback or stimulation of the fingertips"
I'm also not sure about the control electronics in that project (a subject I only have a limited grasp of)The Stanford /synergic implementation almost certainly makes use of an initial surge current and a phase-reversed end current to improve the rise and fall times. The problem is caused by the relatively stiff spring. We're back to the spring and resonance again
Some other DIY glove makers I know measured the C-MF against the Teac exciter they were using. The exciter measured much better (shorter rise and fall times. This is hardly surprising. Audio devices need near instant rise and fall times or they sound horrible. The lra needs special control currents to overcome the effect of the spring. I couldn't identify where in the buzzah design that had been incorporated.
The DRV2605L seems to be capable of overdrive and braking but the buzzah build doesn't make it clear it has been implemented
Hello WTP, ALL of what I just read from this “DIY Glove Tactor Housing Design WiP by Neurosmith, is absolutely OVER MY HEAD to understand. I am guessing that the Tactor Housing is not the beginning of the DIYing of making these gloves. Do you or anyone on these posts have a outline of the beginning to the end of a “how to make the gloves”? I would LOVE to be able to give something to my engineer so he can make them. I am guessing there is SO much more than these Tactor Housing instructions. I Don’t know WHAT to give my engineer. Where to even begin. Can you or anyone who has DIYed these gloves help me? I definitely understand that it’s complicated, but, ANY help or direction would be EXTREMELY appreciated. I would ONLY want the instructions that are close to the Tass Gloves. I could print out whatever posts I see, but, that does NOT seem like the way to go, I don’t know what’s relevant, or where I should start with this. Please, I know everyone is busy with their lives, I understand that, but even the basic starting of the process for starter’s would be fantastic! Winnie, OR anyone, willing to share and help me, (this is for my best girlfriend’s husband), who REALLY wants/needs them. He is adamant that he will take the time (4 hours a day for 4 months, per Winnie), so we really need the basic knowledge, if possible. Thanks, and hat’s off to Winnie and every other DIYer on this forum working diligently on making these deeply desired Gloves. Please Help! Thanks, Melodi
I agree w/ your excellent points re: the differences in perception of vibration characteristics generated by LRAs, ERMs, audio exciters, MATs. However, the pricey C-MF tactors are not generally available (let me know otherwise), so we are using z-axis LRAs for prototypes for now.
Fortunately, buzzah electronics and its s/w can support driving LRAs, ERMs, audio exciters/MATs, with fixed and/or random combinations of vibration parameters (vibration freq, amplitude, intensity, jitter, on/off times, mirroring, etc...) to hopefully enable stimulation to be "effective" with whatever tactors yield positive results. But, as you know, symptomatic improvements can take several months of 4 hours/day stimulation to be evident.
That's where we are at present, hoping the collective efforts of the community here lead to improving conditions for PwP everywhere.
After reading Winnie's comments yesterday I started wondering if the Buzzah could be adapted to drive audio exciters instead of LRAs. Would you just use the Adafruit Audio BFF mounted on to the Adafrunit QT PY then run that to a multiplixer to split the audio out and then run wires from the MUX to the audio exciters? Gotta be more complicated than that I assume. But if you can use simple, cheap Adafruit components it would be a lot cheaper than Winnie's Raspberry Pi, audio extractor, amp, resistor board design I would think.
There are certainly other far less klutzy ways to drive audio exciters if you have the engineering skill. My friend who wrote the software for the original 4 channel audio is working on an arduino project, and another group, using teax exciters are using a Google open source project board
Yes, the EA devices are not readily available to anyone outside recognised research establishments. I believe the C-MF retails for about $300. It's control unit is $1500. Thats nearly $5000 for the basic parts, plus a bit for the gloves.
So a less expensive , readily available , device has to be found. Again, I havent yet found an LRA that works with the perpendicular localised action of the C-MF (other than alternative EA devices like the C2). I doubt Dr Tass and his laboratory tested and rejected alternative devices. They opted to the "reference" solution by the leading supplier that WAS available to them as a recognised research body.
It is worth reviewing Dr Tass device construction considerations in the supplementary documents of the only (tiny, open label) clinical trial reported to date
"Different types of sensory nerve endings are located within the skin; shallow receptors in the dermis include Merkel’s disks, Ruffini cylinders, and Meissner’s corpuscles, while deeper receptors include Pacinian corpuscles. The interaction between the mechanical properties of the skin and tactile sensory perception can be modeled (Phillips and Johnson, 1981). The displacement of a surface against the skin can be used to define the stimulus together with the contact characteristics and the dynamics. For vibrotactile excitation, a relatively simple relationship between the volume displacement and sensory stimulus can be used as a measure of sensory stimulus...
1.2 Actuator design
Vibrotactile actuators, or tactors, can be classified with respect to their ground reference. Actuators are attached to a large external mass and their ground reference corresponds to the external support. In contrast, wearable actuators are lightweight, rest on the skin and thus have a ground reference that is internal to the body.
Our design approach was to configure our tactors to have a “contactor” (C) that oscillates perpendicularly to the skin, surrounded by a housing (H) and radial gap. The moving “contactor” was lightly preloaded against the skin (Zvc), as well as the housing (ZvH). When an electrical signal was applied (producing a force F), the “contactor” oscillated with a velocity (Vc) perpendicular to the skin, while the surrounding skin area was “shielded” with a passive housing (Mortimer et al., 2007). This provided a strong, point-like sensation that is easily felt and localized."
(my emphasis)
A close copy of the original glove requires a moving contactor - not one that micro-vibrates as a block in response to a z axis internal stimulation, but one which compresses and decompresses the skin. An open chassis (EA style) LRA, or a MAT
Does it matter?
Probably. First, in my experience, (and I recognise how confused and subjective that might be as a wholly solo project with only comments from others on this and other forums as a reference)
in my experience, there is a consistent pattern that smaller, localised, stable, and low amplitude improve results. I have only ever used one frequency - 250Hz, so can't comment on the relative performance of other frequencies. The other HUGE factor I have already mentioned, is 4 hours a day for an extended period. Not "half an hour which is quite nice", nor 2 hours every 2nd Thursday in Lent.
Do the "sealed box" tactors work? Buzzboard and the Haptic glove users have reported valuable benefits, and I respect their integrity and honesty. In particular I have corresponded at length with Ethin , whose comments and insights I greatly value, who is unequivocal about his gloves with that sort of device "working".
But, we have also discussed the "dual nature" of the glove therapy. Dr Tass main focus - is Coordinated Reset (CR) - the principles of which he first encountered, and developed, and clinically trialled via DBS as a delivery mechanism. Subsequently he looked to vibrotactlie stimulation as an alternative, non-invasive means of creating the signals that achieve CR - creating vibrotactile Coordinated Reset (vCR)
But vibrotactile therapy for Parkinsons is as old as Jean Charcot , and there are numerous modern variations from whole body vibration plates to the Charco1 device.
My neurologist in his report on my last visit, when I discussed the pain relief from dystonia that I experienced (for which my GP had prescribed, unsuccesfully, strong steroid anti-inflammatories, and codeine, speculated whether it was "akin to a tens machine"
How do you distinguish the genuinely therapeutic affect of "good vibrations" from the new and exciting possibilities of CR?
It's complicated. And this post is too long. But the "sham" protocol devised by Tass appears to be one of the effective protocols with amplitude variation. I'll come back with a separate post on the subject of CR risks and variability
Thank you kindly for your comments. It appears you have been traveling a discovery path that resembles what a small team my colleagues have been on for the past year. We are familiar with the tactor design considerations and papers you referred to.
We are using LRAs only because they are cheap, readily available and offer a flexible alternative - yet we are not wedded to them and ultimately seek only therapeutic benefits. We were fortunate to do a subjective comparison of one version of the trial gloves to our LRA based designs and concluded that the stimulation perception was “similar enough” (intensity and localized stimulation) when including the localization disk on top of the tactor, as well as dampening foam around the body. Several different design variations were built and tested but not overextended time periods.
And this is a key point where I am in 100% agreement with you: the four hour per day protocol is a huge commitment.
Without real time neuro feedback in the form of EEG analysis, for example, we have had only subjective feedback to know whether therapy “might” be working based on our design. There have been encouraging indications from more than one of us, but there are a lot of variables.
So, we press on… and of course, we are open to more thoughtful insights and improvements from you and others in this community.
Apologies- "I'll come back..." I got sent to chainsaw some logs for the fire, and got carried away. I had meant to explain, for the benefit of others
It's a complicated subject , but there are a couple of reasons it may be beneficial to attempt to stimulate only FA2 receptors in a narrow region, and low amplitude perpendicular"compression and decompression" may be favourable. A cacophony of noise - from a loud unfocussed buzzing device may ring the wrong bells at the brain end of the signalling chain - and this may reduce the focus and efficacy.
Just compressing and decompressing a small area by a tiny amount at a frequency best adapted to FA2's may be effective at getting them to signal, and no other receptors, including FA2's in adjacent areas , to send signals.
Because the receptors signal differently, there is a risk that the pattern is defeated. To quote Dr Tass again (my emphasis again)
"The majority of mechanoreceptors of the glabrous skin of the human hand are fast adapting (FA), where FA I mechanoreceptors respond to 30–60-Hz vibrations, and FA II mechanoreceptors to 100–300 Hz (Johansson and Vallbo, 1983). Conduction velocities of FA I and FA II mechanoreceptors are in similar ranges (Knibestöl, 1973) but may still be different enough to compromise the vCR activation pattern. Smaller vibration amplitudes might be more beneficial for two reasons: (1) Smaller-amplitude 250-Hz vibrations might stimulate the FA II mechanoreceptors more selectively, which might be favorable in case of larger differences in conduction velocities of FA I and FA II mechanoreceptors; for details, see Tass (2017). (2) Smaller-amplitude 250-Hz vibrations of different fingertips might activate cortical representation areas with smaller spatial overlap, which is more favorable for CR stimulation; for details, see Tass (2017).
In the computational model, we find better performance at moderate amplitudes as well. Here, high mean input firing rates corresponding to large amplitudes of skin indentation oscillations (Harvey et al., 2013) cause high firing rates of stimulated neurons during stimulus deliveries. Then, the stimulated subpopulation provides strong excitatory input to the other subpopulations that may result in synchronization of the spiking rhythms of separately stimulated subpopulations. Therefore, strong stimulation reduces phase shifts between the rhythms of individual subpopulations and reduces acute desynchronization effects."
To return full circle, to the original point of this thread, I would expect that an LRA mounted in a tactor such as the one illustrated is going to improve significantly on the performance of a closed box LRA directly coupled to the skin.
I am using non-mirrored RVS most often with jitter and amplitude modulation (“double randomization” as referred to by Dr. Tass).
I’ve only recently begun testing the contributions to amplitude modulation by randomly changing the stimulation frequency from 170 Hz to 250 Hz. I guess you could call this triple randomization. Given the number of possible parameter permutations, as well as the cautionary information in the sham protocol paper , we have begun to explore using real time neuro feedback to help guide stimulation parameter selection. With the huge time commitment involved in VCR therapy, hopefully this might help calibrate therapy parameters more quickly. Admittedly, this is a citizen scientist approach at best….
Chiming in just very quickly: I'm also using non-mirrored RVS with jitter --- non-mirrored because I did not find the argument given by Peter Tass for the mirroring very convincing and generally follow the rule that the more randomisation the better (my, likely overly simplistic, interpretation of the Tass computational studies).
Along that line, for the last four weeks I also returned to randomising the amplitude (ie, following the "double randomisation" approach). I know that I previously said that this does not work for me, but I am now using it on a much lower level than before. That is, I take my normal, already low stimulation amplitude as a starting value and then randomise the amplitude of each individual stimulus between zero and that value. This approach seems to be working quite well, even though it means subjectively missing some of the stimuli. I think the trick is to make up for the missed stimuli by sufficiently long stimulation sessions, so I really try not to cut corners and not to do less than three hours of glove time per day.
Also randomising the stimulation frequency appears less appealing to me, because I think that this just amounts to a variation of the effective stimulation intensity of the Pacinian corpuscles (lower effective intensity for lower frequencies), due to their intrinsic response profile.
Incidentally, I saw my neurologist for a checkup this morning, and he was positively surprised by the stabilisation and improvement of my symptoms over the last 2+ months (particularly, much reduced rigor, and reduced need for medication). That's of course very encouraging.
Not sure yet, but some combination of SMR spindle monitor and queuing. Since none of us is a neuroscientist, we are in the discovery phase, looking at commercial solutions. Also are you looking at this?
Although this approach is for Dbs, it sheds some light on what might be done adaptively, possibly for VCR:
I think a straightforward approach would be to do what Tass did, to use monitoring by sufficiently resolved EEG (there are professional, as well as open source solutions for it, e.g., opensourceimaging.org/proje.... But Tass used EEG at the group level, and the experts I talked with were doubtful that you could actually identify the chracteristic changes in beta synchronization by EEG at the level of individual subjects, i.e., without averaging across a larger group. It might still be worth to give it a shot, but the effort may come to nothing.
A more promising, practical alternative to neuromonitoring could actually be behavioral tracking by apps on wearables (such as an Apple watch) that also log the vCR stimulation. Due to the expanding user base of these devices, this could generate a sufficient amount of data for analysis, even though there are likely lots of artifacts in the data (to go by what the health app on my phone shows).
I agree the tracker-based approach is promising for us citizen scientists...
In other news...
Possible clues here about how amplitude and frequency are varied to help DBS patient symptoms. Wondering what we can learn from this to apply concepts to VCR therapy?
I came to the top of the Cue 1 list, but didn't take it up because the gloves were working so well for me by that stage.
I have avoided non-mirror with temporal jitter because of Peter Tass comment about
"For bilateral application of noisy vCR in PD patients, we used a mirrored delivery such that right and left fingers 2–5 were coincidently activated, respectively. This was done to avoid bilateral masking-like interference (Craig, 1985; Craig and Qian, 1997)."
I'm still trying to get my head round amplitude jitter and double randomisation given the models were based on DBS rather than vCR, and the fCR relationship with the synchronisation frequency and the fact that they were using frequencies up to 50Hz which makes for pretty short bursts compared with 1.5Hz. Too short for vCR. For "trying to get my head round" read "waiting for a chance to discuss with a friend who is much better at maths than me"
Yes, that was the argument that I did not find convincing :-), as you can find descriptions of inter-hemispheric enhancement as well as competition in the literature. But, depending on how precise the mapping between the left and right sensory homunculus is, it may not matter too much anyways.
My recollection of the 'double randomization' paper (pubmed.ncbi.nlm.nih.gov/369... was that this was a general study of plasticity and descynchronization in a neuronal population that may be applicable to DBS as well as vCR, but I should give it another, more through read to understand what could be learned specifically for vCR.
Another, more practical motivation of the amplitude randomization was the ongoing discussion of finding the right stimulation intensity. Leaving this as a random setting would spread the odds of hitting the right value, but at a potential cost of greater noise and the need for longer stimulation sessions.
Great input and insights guys! Thanks for sharing! Just to recap/summarize. WTP, PWPInnovate898 (+friends), and Ethin have all experienced at least moderate benefits from their DIY vCR. All use perpendicular stimulation via either LRA or audio exciter. And for the algorithm variables:
WTP: mirrored RVS with 23% jitter
PWPInnovate898: non-mirrored RVS most often with jitter and amplitude modulation
This study maybe could help you understand the fundamentals of tactile perception and could make you understand what the difference might be in the use of different types of transducers.
One of the problems in my opinion is that tactile perception has a threshold of adaptation over time, that is, from an initial perception of the elevated stimulus it goes gradually decreasing over time and is not the same for everyone.
Quote.
“Mechanotransduction is the process by which mechani- cal displacement is converted into neural action potentials. The receptor system has to cover a broad range of mechani- cal sensations—therefore requiring the skin to made up of a multitude of receptors, each with different sensitivity and frequency dependence. The density distribution of receptors also varies across the skin, being more concentrated in body regions involved in exploration and manipulation. Receptors also have different rates of adaptation to stimuli. PC receptors, for example, are RA in that their sensitivity to a continuous stimulus decreases with time.”
Content on HealthUnlocked does not replace the relationship between you and doctors or other healthcare professionals nor the advice you receive from them.
Never delay seeking advice or dialling emergency services because of something that you have read on HealthUnlocked.