Here is a link to their page: oedk.wildapricot.org/Treatm...
Apparently it is a new open source glove design developed by faculty and students.
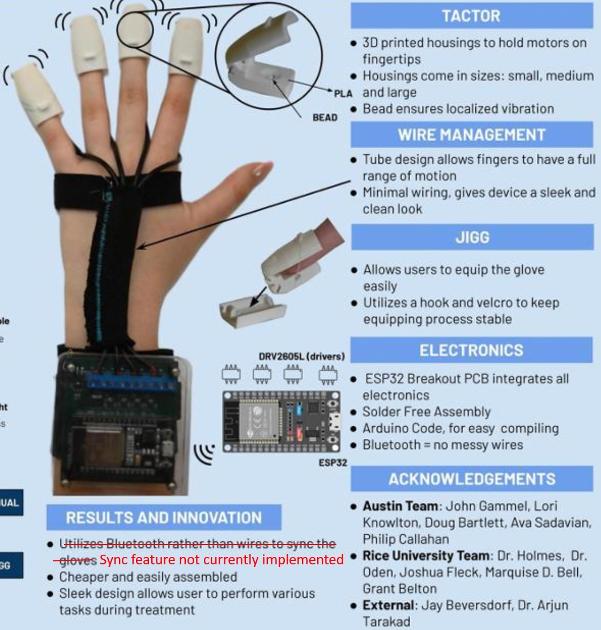
Note that the Bluetooth sync feature is not currently implemented in the code they provide on Github
Here is a link to their page: oedk.wildapricot.org/Treatm...
Apparently it is a new open source glove design developed by faculty and students.
Note that the Bluetooth sync feature is not currently implemented in the code they provide on Github

The link you posted did not work.
This link works for me: oedk.wildapricot.org/Treatm...
Because the link posted in the main post is oedk.wildapricot.org/Treatm...
The word 'apparently' is mistakenly joined to the URL, and needs to be separated by a space.
What a brilliant find; thank you. I have been fascinated by these gloves since seeing Dr Tass interviewed. I am on his mailing list for updates but have heard nothing. I was wondering if it was possible to have a go at making them and you've just given me a fabulous starting point. If I have any luck I'll let you know!
And thank you scotta for updating the link ")
I have my son looking into making this for me. I’ll keep you updated
please let me know how you get on with these gloves 🧤 as I have Parkinson as well kind regards Dean
I am ordering boards if anyone wants a pair please reach out to me on chat, not reply
EDIT- I was just digging into the RICE project a bit more. It is not a turnkey project although it is good work. They don't have a code repository for the software or the fingertip tactor holders and they omit the microcontrollers, batteries, bus bar and other items from their BOM. I have reached out to them and I hope they are able to respond.
Thanks for your comment Ctime. I had the same impression last week, that this was a really great student project that has apparently never been implemented in the real PWP world. I emailed them last week about the code and 3D prints and quickly received the enthusiastic reply I pasted below. Perhaps our queries will be the impetus the OEDK team needed to tie up loose ends and put their design to good use for PWP.
EMAIL FROM GLOVE TEAM AT RICE ODEK:
Thank you for reaching out! We are super excited about this!!
Attached are the files for 3D printing, as well as the Arduino code let us know if you have any questions or would like to zoom call to chat about the design.
TH := tactor holder
B := bottom
T := top
S := small
M := medium
L := large
The file labeled Stud is the "bead" and ST v2 is the template for the bead application
drive.google.com/file/d/1I1...
drive.google.com/file/d/1Nu...
drive.google.com/file/d/14a...
drive.google.com/file/d/1Tr...
drive.google.com/file/d/1Tx...
drive.google.com/file/d/12R...
drive.google.com/file/d/1d9...
drive.google.com/file/d/1ur...
drive.google.com/file/d/1AW...
I will also add that I have been working on (and using) a very similar design using the same square LRA as in the OEDK design, although my design is not wireless as shown in pictures below. (I should note that my build uses Kris Wilk’s Buzzah electronics from Github). I think my glove/tactor design has some advantages over the OEDK, and could be swapped into their design to use the OEDK wireless controllers for those who prefer OEDK's two wireless control boxes, instead of a centralized brain mounted on a neck speaker as in my design. In my development/testing phase of the tactors, I found that springs worked much better than foam to decouple the LRAs from the tactor housings in order to achieve greater vibrational amplitude. I have been using my system for about 5 months and am very happy with its performance. I will be posting a link to my build directions later this week here on HealthUnlocked.
Hello Mark,I am trying to get 3D printing quote online. One of the file Stud-V1 saying that X+Y+Z should be greater than 30 mm. Can you please help why I am getting this error and how it can be resolved?
The stud in the OEDK design is tiny. It is a small bead that sits on top of the LRA to make contact with the finger. The X+Y+Z restriction is the 3D print place saying that the bead is too small for their printer to reliably print. I am no expert on 3D printing, but I am guessing they are worried that such a small print might not achieve proper bed adherence. That said, the stud must be printable as evidenced by the OEDK pictures. I would suggest sending an email to the print place or going to a different site.
Hey Mark, thanks for all that info. Do you have a link to the Arduino Bluetooth code (the ones listed above appeared more for 3D printer)? Thx
The code is on their Github site, but note that the bluetooth synchronization has not been implemented in this preliminary version of the code. A very similar wireless design called the Blue Buzzah 2.0 that DOES feature bluetooth sync will be posted very soon - probably in Jan 25. Version 1.0 is currently working, but the developer wants to miniaturize the processor boxes before he posts a link here on HealthUnlocked.
Thanks Mark and Merry Christmas.
More vibrational amplitude from spring
Anybody in India who can make the gloves for me?
Sure. Go to any Engineering college and talk to their Electronics department faculty and ask them to recommend the project to their 4th year students.
No matter where you live in India, there should be a gazillion colleges out there 😅😂
Edit :
We can do the same thing with Electrical Engineering department of any university here in the USA or most people countries. TBH. Problem might be infringement of any existing or pending patent. But that is a question for a lawyer.
I think it's generally great to see more efforts to build and use vCR gloves.
BUT the specs of the tactors used in these gloves (vybronics.com/linear-lra-vi... ) are quite a bit different from the ones used in the original Tass gloves, which may be relevant for their effectiveness.
In particular, given these parameters of the VLV101040A:
Rise Time (ms) MAX *: 10
Fall Time (ms) MAX *: 40
Resonant Frequency: 170,
you might as well just use the prefabricated bHaptics TactGloves (bhaptics.com/tactsuit/tactg... ) and save yourself the hassle of glove-building.
Hi Ethin, Thanks for your input. I always very much appreciate your comments and insights. To respectfully respond to your points about the VLV101040A:
Frequency - The VLV’s "resonant frequency" is the frequency where maximum amplitude occurs. Ideally, our buzzers would have a 250 Hz resonant frequency (as you suggest) so that we would be able to obtain the widest range of vibrational amplitude for treatment at the preferred frequency. However, even with my VLVs set to buzz off resonance at 250 Hz, I still get plenty of amplitude out of my spring tactors at 250 Hz. I checked the OEDK and it also has the option to buzz at 250 Hz. I think the 170 Hz frequency restriction on the bHaptics gaming glove is a marketing decision rather than a physical limitation of their LRAs. They probably restricted their glove from having higher buzz frequencies so they would always have max amplitude available to gamers at resonance - so for gaming, amplitude is probably more important than frequency.
Rise/Fall times: The OEDK, and the Buzzah I use, both use special driver chips external to the processor that use braking and over-voltaging to get much improved specs for rise/fall times that are comparable to the Tass specs. In the pdf build instructions I will post later this week (next week at the latest!), I bench test the VLV buzzer with the driver chips and I present scope traces with VLV rise/fall times of 4ms/12ms. Notably, my bench tests were done on a VLV outside of a tactor. I suspect that the rise/fall times would be even better in a real world tactor situation where the fingertip skin introduces a drag component to the VLVs case vibrational response.
bHaptics vs OEDK: In my previous glove prototype, I essentially had the same no-tactor bHaptics setup (except I was buzzing at 250 Hz instead of 170 Hz). When I first upgraded to tactors, I set it up so one hand had my gen 4 tactors, and the other hand had only the VLVs with no tactors. I immediately noticed a stronger point-like feel to the buzzes on the tactor hand where the contact area was limited. Perhaps even more important, I also came to realize that I was often loosing buzz in my no-tactor hand when I would touch objects and perform tasks (since the LRAs would either move or ground out with external contact). The hand with tactors retained good finger-buzzer contact when performing activities – with no grounding out because of the tactor cases. So, I noticed a big advantage to having tactors with my LRAs and have been using them ever since, even though they are much more bulky than going with no tactors. I also think the 250 Hz buzz is “zingier” than the lower bHaptics 170 Hz buzzing which seems to me to be more diffuse and non-point-like feeling.
I think you are correct in observing that good tactors make an important difference. That said, Ethin has a lot of experience with both, and reports some benefits from the bhaptics. We have discussed whether there is maybe a pure tactile acute therapy which has no CR, or much reduced CR (like Charcotts train) and not reached a conclusion.
You are also correct to observe that the relevant LRA`response is the one achieved with a surge/brake controller. above my paygrade but I note they are using a TI DRV2605LDGS and that it is necessary to avoid auto resonance detection .
which brings us to resonances and coupled oscilators? Why the angst about amplitude? i have again attached what i believe to be the most important of Dr Tass diagrams. As you observe, the objective is precision and focus in using PC's to send signals to the brain. Focus, first involves using a frequency (250Hz) which they are most receptive to AND other mechano-receptors in the finger are not, AND not setting off the neighbours, by focusing on a small contact point, mechanical isolation of the surrounding skin, AND being as quiet as possible. 0.1mm is tiny - about the thickness of paper
The Tass gloves also focus the signal by using z axis vibration (squashing and unsquashing the PC's, from a starting point 0.5mm in (which is where PC's are found). In that regard I am not sure how these tactors are set up.
Apologies if I'm teaching my granny to suck eggs, but...
LRA' are essentially a mechanical tranducer with a coupling spring. There is a conventional voicecoil and magnet, a spring and a cover (mass). The spring constrains the output to one dimension. And the spring and the mass - like any spring and mass, have a resonant frequency. And LRA's are most efficient at their resonant frequency. The resonant frequency can be chosen or set in construction by changing the mass or the compliance of the spring.
the advantage that the LRA used in the tass glove has is not rise and fall times. Nearly all LRA's , like the LV101040A, are a jack-hammer in a biscuit tin. They are sealed metal boxes with moving parts inside which hammer against one wall of the box (the lid in this case). By contrast , the EA C2, C3 and C-MF tactors have a hole in the biscuit box lid, which the transducer assembly pokes through. the case is no longer the vibration surface, but now an isolating shield. it is a combined tactor/lra. Fundamentally very different. The DAEX-9-4sm in a 3d printed isolation case that i use is much closer.
lets break this reply in 2 and discuss resonance and coupled oscilators in the next reply. if anyone is interested
Thanks for all your insights Winnie!
Here is a preliminary link to the document I just finished with my Buzzah build steps. Please initiate a chat with me if you find errors or have suggestions.
github.com/TactileDesign/DI...
oops - meant to reply by private message 🥴
I cant find a way to add a picture to a chat, so I'm going public! A few thoughts
Personalisation – I believe this is 2 issues, neither of which require sophisticated monitoring equipment
1) Skin varies enormously in elasticity and sensitivity – to get a signal output of a given amplitude needs different input amplitudes. You need to adjust the volume until a faint signal is just felt. And maybe adjust the pre-load depth similarly, until the impression is just felt
2) Synchronised frequency varies. This is related to the primary symptom to be treated – the frequency of the synchronisation to be disrupted. Tremor is associated with Theta band (3-10Hz) whereas rigidity and bradkynesia are associated with beta band (13-30Hz). So you would choose a pattern based on which symptom you are looking to treat.
Tass design objectives overly conservative?
Tass design objectives are around sending a focussed signal. Most of the Tass papers are either theoretical mathematical models, or DBS. In either case a precise direct position of the signal is assumed / achieved
With VCr there is the added complication of trying to send a signal using mechano-receptors in the skin. Dr Tass is trying to use just one of the 4 types of mechano-receptor – the Pacinian Corpuscle (PC) to do the signalling. And trying to signal to a small defined area. 4 small defined different separate areas. And to signal a precise pattern
Precision of timing is critical for ensuring that the signal is timed to ensure the postsynaptic neuron fires before the presynaptic neuron which leads to desynchronisation. If the presynaptic neuron fires before the postsynaptic neuron then synchronisation is strengthened. This is complicated by the fact that the neuronal networks are "plastic" and adapt (change)
Bad timing provides acute relief, but aggravated synchronisation (instead of desynchronisation) . So – to get precise signalling temporally as well as locally, Peter Tass tries to use a small isolated group of PC’s only to send his signals, and a sharply defined start and stop to the signal pulse. Why PC’s ?
They are fast and precise – also known as RA2 receptors (or FA2 receptors) the diagram shows why they are the choice for precise signalling.
And why you don’t want the other cells signalling and sending noise signals which arrive at the wrong time
Hence Peter Tass specifications:
• 2ms rise time. Rapid fall
• 5mm contact area (local group of PC’s)
• 0.5mm preload – to ensure the signal is recognised as soon as it starts
• 0.03mm peak to peak signal amplitude (very quiet) to just trigger the local cells and not shout to the neighbours
• Damping of surrounding skin also for localising the signal
• Frequency of signal used which PC’s respond to readily, and other MR’s less so (200-300Hz)
I think it fair to say that Dr Tass has thoroughly researched this
Very informative as always Richard. Wondering if you can say more about, "Tremor is associated with Theta band (3-10Hz) whereas rigidity and bradkynesia are associated with beta band (13-30Hz). So you would choose a pattern based on which symptom you are looking to treat." ... Are you saying that Tass has different patterns of vibrations? I've only seen the randomized patterns that he specifies in his 2017 and 2021 papers... Is that the pattern you're referring to?
Much of his publication I have read relates to DBS rather than VCR. I have filed all this stuff away, and I am just digging it out again for Mark. I'll try to find time to review and organise over Christmas
The new control system, bulky, luggable, but robust and much easier to use - and solderless
OK - nearly solderless. Someone still has to solder 2 wires to 8 exciters, but your local phone repairer, college, teenage electronics hobbyist, PC repair shop etc - should do that for beer money
This just plugs together, like wiring up your home cinema. It now has an easily visible touch screen, which is really simple to use to start the program, and you can see how long is elapsed, and how long left much more easily too. It still fits in a Ryanair cabin bag - and is easy to view and operate from there, and can be worn over the shoulder, so is mobile.
Mrs WTP has promised to do the finishing touches on the new gloves - which we are going to try to keep minimalist. An elastic strap across the palm / back of the hand, with a solderless RJ45 block velcro'd to it. Tiny Tactors now, held on with an elastic strap loop - no velcro, and probably thin straps from the palm strap to the Tactor housing strap, to keep it tidy.
It's much more sensible, using 4 stereo off-the-shelf amplifiers of the correct power rating, instead of a 4x50wpc amp and a fiddly resistor network to attentuate the power. And series wiring of the resistor box, which I used to further reduce the power developed across the LH and RH , proved to be tricky to problem solve and fault find
I like these 😀
Fantastic work Winnie!
Curious which new touch screen you bought to replace the old one. Like you, I find the old too fiddly to use without a mouse and I'm tired of using the mouse.
CUQI 7" IPS LCD HD Touch Screen 1024x600 Mini Monitor with Speaker for Raspberry Pi 4B/5 PC, Windows, Xbox, CameraCUQI 7" IPS LCD HD Touch Screen 1024x60…
Looks really nice. My amplifiers and audio extractor are being held hostage by the Canada postal strike which is on day 27…
If there is interest, I'll produce some build videos, instructions, and bills of materials - after Christmas. Probably after the 31 January tax return deadline (day job!) This shows how much smaller the new tactors are compared with the Mk4